У Природы много интересных изобретений, которые человеку не стыдно скопировать и использовать в повседневной жизни. Миллионы лет эволюции сотворили чудо из всего, что нас окружает. Часть из этого опыта человек пытается привнести в мир роботизированной техники, например, считая его ценным для создания летающих роботов-насекомых. Как следствие, появляются роботы-стрекозы или роботы-пчёлы. Однако сложность масштабирования маховых механизмов и, как следствие, снижение управляемости заставляет искать иные неприродные источники подъёмной силы для миниатюрных летательных аппаратов.
Учёные из Калифорнийского университета в Беркли предложили использовать для роботов масштаба насекомых ионную тягу. Принцип работы таких ионных двигателей заключается в том, что с электродов под очень высоким напряжением положительно заряжённые ионы (преимущественно азота) устремляются к решётке с противоположным зарядом. По пути ионы вовлекают в процесс нейтральные молекулы из воздушной среды, которые пролетают сквозь решётку и создают тягу. Такие двигатели бесшумные и способны поднять определённый полезный вес, но, к сожалению, требуют значительных запасов энергии.
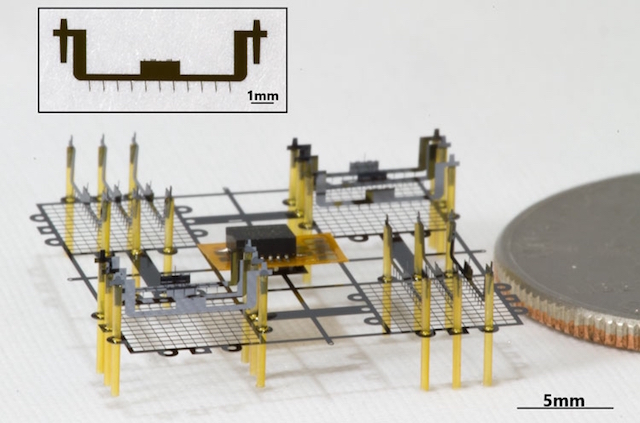
В лаборатории университета создали летающий прототип платформы на ионном двигателе. Размеры сторон робота составляют 2 см при весе конструкции 30 мг. Ещё 36 мг весит контроллер питания испускающих электродов. Напряжение на электродах достигает 2000 В, хотя сила тока всего 3,5 мА. К опытной платформе подводятся 7 проводов, по которым осуществляется питание и управление. Принцип управления прост ― в необходимой последовательности отключается один из четырёх массивов электродов, после чего происходит наклон и перемещение в нужную сторону.
В дальнейшем учёные планируют усовершенствовать платформу до полной автономности управления, за исключением питания. В обозримом будущем никто из них не ждёт появления достаточно мощных, ёмких и миниатюрных автономных источников питания, чтобы разместить их непосредственно на платформе. Но управление можно будет отдать роботу, для чего планируется создать специальный контроллер и оснастить робота оптическими и другими датчиками.
По информации https://3dnews.ru/982351?ext=subscribe&source=subscribeRu
Обозрение "Terra & Comp".
�









{kind=link}